




































Algılama Yöntemi ve İşlevi

Farklı algılama görevleri için çeşitli algılama prensipleri kullanılabilir. Belirli bir uygulama için en uygun algılama prensibi çeşitli hususlara göre belirlenir: Bunlar arasında algılanacak nesnenin malzemesi, uygulama ortamı ve algılamanın yapılacağı mesafe yer alır.
Algılanacak nesne elektriksel olarak iletkense, örneğin metalden yapılmışsa ve yakın mesafeden algılanabiliyorsa, endüktif bir sensör önerilir.
Endüktif sensörler, sensörün yüksek frekanslı bir manyetik alternatif alan yayması şeklinde çalışır. Metalik bir anahtarlama hedefi bu manyetik alana yaklaştığında, enerji girdap akımı kaybı yoluyla alternatif alandan çıkarılır. Buna ek olarak, ferromanyetik anahtarlama hedefleri yeniden mıknatıslanma kaybına neden olur. Bu kayıplar değerlendirilir ve tanımlanmış bir eşiğe ulaşıldığında sensör anahtarlama yapar.
Tipik uygulamalar arasında her türlü pozisyon izleme, valf pozisyonlarının izlenmesi ve kayış hareket hızlarının tespiti yer alır. Fiziksel algılama prensibinin mükemmel çok yönlülüğü, piyasada belirli çalışma koşullarına uyacak birçok farklı tasarım ve sensör versiyonunun mevcut olduğu anlamına gelir; örneğin redüksiyon faktörü 1 sensörleri, NAMUR sensörleri, metal yüzeyli sensörler ve araçlarda kullanım için E1 tip onayına sahip sensörler.
Uygulamaya bağlı olarak aşağıdaki algılama prensipleri alternatif olarak kullanılabilir:
- Kapasitif sensör: plastik veya kağıttan yapılmış nesneleri ve sıvıları (yağlı veya sulu), granülleri ve tozları algılamak için
- Manyetik alan sensörü: manyetik olan veya bir mıknatısla donatılabilen nesneler
Endüktif Sensör Tasarımı
Endüktif sensörler temassızdır. Sensörler ölçüm alanlarında bulunan metal nesneleri algılar. Bunu yapmak için metal nesnenin elektrik iletkeni olarak sensörün yayılan manyetik alternatif alanıyla etkileşimini kullanırlar. Elektrik iletkeninde, alandan enerji çıkaran ve böylece salınım genliği seviyesini etkileyen girdap akımları indüklenir.
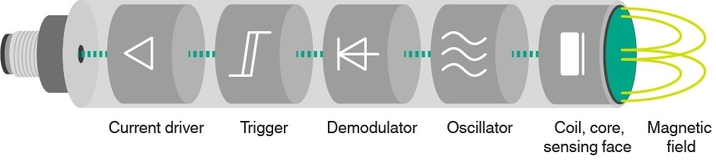
Endüktif sensörün çekirdeği, manyetik alanın belirli bir yönde kaçmasına izin veren, genellikle ferrit çekirdekli bir bobindir. Sensörün arkasında bulunan osilatör, sensörün algılama yüzeyinden kaçan bir manyetik alternatif alan oluşturmak için bir LC rezonans devresi kullanır. Eddy akımları ölçüm alanında bulunan metal nesnede indüklenir. Bunlar osilatörden enerji çeker. Osilatördeki sinyal seviyesi değişir. Sinyal seviyesindeki değişiklik daha sonra ikili sensörlerde bir Schmitt tetikleyici aracılığıyla çıkış kademesini değiştirir. Ölçüm sensörlerinde, sinyal seviyesindeki bu değişiklik, nesne mesafesine bağlı olarak analog çıkış sinyalini etkiler.
Endüktif Sensörlerin Tarihçesi
İlk endüstriyel sınıf endüktif yakınlık sensörü 1958 yılında Walter Pepperl ve Wilfried Gehl tarafından geliştirildi ve piyasaya sürüldü. O zamanlar, geliştirme komşu BASF tarafından yönlendiriliyordu. BASF, o dönemde malları algılamak için kullanılan mekanik anahtarlama kontaklarını, kırılma kıvılcımlarına neden olmayan temassız anahtarlama sensörleriyle değiştirmek istiyordu. Amaç, patlama tehlikelerini önemli ölçüde azaltmaktı. İlk endüktif yaklaşım sensörü bile NAMUR'a uygun olarak kendinden emniyetli olacak şekilde tasarlandı.
Standardizasyon
Pepperl+Fuchs'un tüm yakınlık sensörleri ve endüktif sensörleri, ilgili IEC/EN 60947 "Düşük voltajlı anahtarlama cihazları-Bölüm 5-2: Kontrol üniteleri ve anahtarlama elemanları-yakınlık sensörleri" standardına uygun olarak geliştirilmiş, üretilmiş ve pazarlanmıştır.
Pepperl+Fuchs'un güvenlikle ilgili sensörleri için ilgili "Düşük voltajlı anahtarlama cihazları-Bölüm 5-3: Kontrol üniteleri ve anahtarlama elemanları-arıza koşulları altında tanımlanmış davranışa sahip yakınlık cihazları için gereklilikler (PDDB)" standardı da geçerlidir.




